论文地址:https://raft.github.io/raft.pdf
原理演示: https://raft.github.io/raftscope/index.html
背景
在分布式系统中,数据一致性是必须考虑的点,而且是优先考虑。在不同的场景中,数据一致性包括强一致性和弱一致性(最终一致性)。Paxos及其变种提供的共识算法扮演了重要的角色。但是非常难以理解和实现,Raft旨在简化算法逻辑,提供易于理解的共识算法。常见的 etcd 就是使用的 Raft 协议。
论文中 Raft 协议主要包括以下部分:
- leader 选举
- 日志复制
- 安全性(实际上是各种边界条件的考虑,额外增加了规则)
- 集群成员的变化
复制状态机
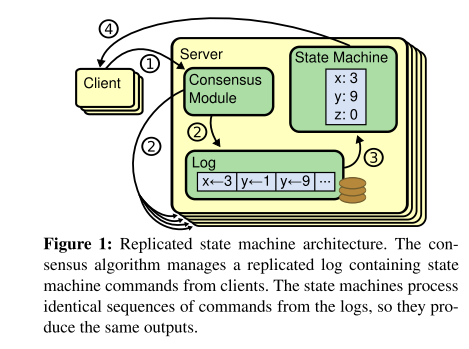
在集群中,机器都会处在相同的状态,及时部分机器失败的情况下。为了达到这个目的,一般使用日志副本的方式。保证副本日志的一致性,就是共识算法的作用。通过共识模块,不同的机器会产生相同的日志副本,副本里的命令是相同的,顺序是相同的。那么状态执行这些log,就会产生相同的状态。
Raft 协议
通常,一个Raft集群包含5个节点,这样可以容忍2个节点的失败。
Raft使用 term (任期)的概念来代替时间的观念。term 使用正整数表示,每次leader选举,都会增加term值。
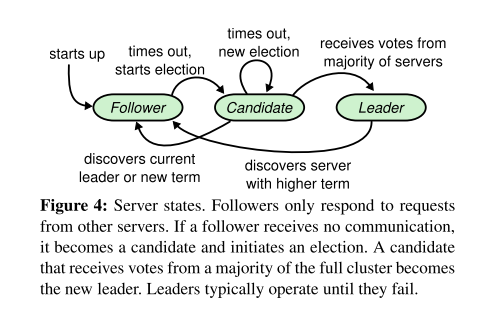
集群中三个角色:
- Follower : 是个被动角色,只会接受请求进行回应。
- Candidate: 候选人,只有 Candidate 才能发起选举投票。选举成功,变为 Leader。
- Leader: 集群中只有一个节点是这个角色。
当系统启动,或者没有收到 leader 的心跳请求, follower 会有一个随机时间,超时后term+1,并且会变成 Candidate 会发起投票。投票成功,会变成 leader , 会立即发送心跳请求。其余失败的 Candidate 会变成 follower 。
集群中主要有两种RPC, RequestVote RPC 和 AppendEntries RPC。前者用于投票,是 Candidate 发起的。后者用于同步log数据,或者心跳请求。
一个节点收到的 term 的比自己的大,会更新当前节点的 term 。
leader 选举
当选举开始时,follower 增加当前的任期term, 然后变成 Candidate。它给自己投票,然后并发的把RequestVote 请求发送给其它节点。那么后面会出现三种情况:
- 收到了大多数节点的投票,赢得选举变成 leader。 对于每个节点来说,对于同一个 term ,根据先到先得的原则只能投一次票。选举的leader 会发送心跳给其它节点,标明身份,防止新选举产生。
- 当在等待投票的过程中,收到了其它leader的AppendEntries 请求。如果leader的term 大于等于当前节点的 term, 当前节点就会变成follower。如果小于,会拒绝请求,并且保持在 Candidate 状态。
- 即没有赢得选举,也没有失败,没有赢取到足够的票数。那么会有超时时间。继续增加term ,并发起新一轮的选举。
Raft 使用随机的超时时间发起投票,这样保证能快速的选举出来。否则如果多个节点同时发起投票,会分散票数,那么选举会陷入循环中。
日志复制
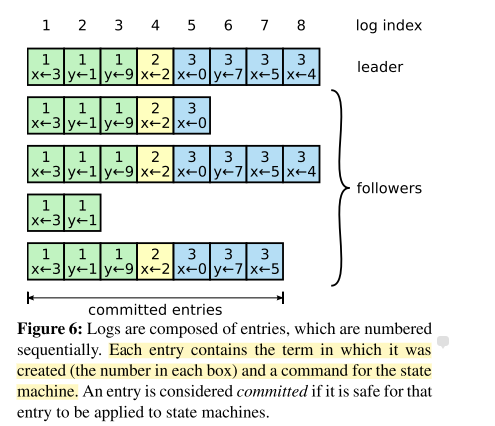
当leader接受到client的请求后,会把command写入到新条目中,追加到日志。然后给其它节点发送副本,当多数节点同意接受新日志后,这个entry 进行提交并且交给状态机执行。同时成功返回给client。等下一次AppendEntries (包括心跳)发送给follower时,follower也会提交相应的日志。
每个日志条目有个index,可以理解成数组的下标。每个entry 包含term 和 command 。
当follower因为网络原因或者系统故障没有收到副本的请求,leader会一直不停地进行发送。
Raft的日志机制保证
- 不同的日志组,如果index和 term 相同,那么command必然是相同的。
- 不同的日志组,如果有相同的index和term ,那么index 之前的日志都是相等的。
leader给follower发送AppendEntries 请求时,不光包含新日志,还包含上一次的index和term, 如果上一次的index和term是相同的,那么之前所有的条目都是相同的,follower会接受这个请求,否则会拒绝请求。
当leader 和follower 都可能crash, 新选举出来的leader 不一定包括之前旧leader所有的日志。但是Raft 的日志规则是以leader日志为准,新选举的leader会把日子强制复制到follower上。为了保证日志的一致性,leader和follower要找出相同条目的最大的日志索引,follower 需要删除之后的日志,完全接受leader发送的日志。
当新leader出来后,它会把它的日志的最大index + 1 变成nextIndex 发送给 follower。发送 AppendEntries 时会包含上一次的index和term, 就是leader最新的log条目。如果 follower 和 leader 的日志是不一样的,请求会被拒绝。leader会减少nextIndex 继续发送 AppendEntries 请求。实际上就是从前往后进行倒推,直到请求被接受。那么只需要从这个nextIndex进行日志复制即可。
一条日志一个请求进行对比的话,效率并不高。可以进行 一个term 里的对比。就是说当follower 拒绝请求时,会把当前的term和当前term的第一条日志的index返回给leader, leader 可以快速的判断当前的term是否包含一致的条目。如果不包含,直接用下一个term进行判断。
安全性
Raft 保证下面的属性在任何时候都是正确的。
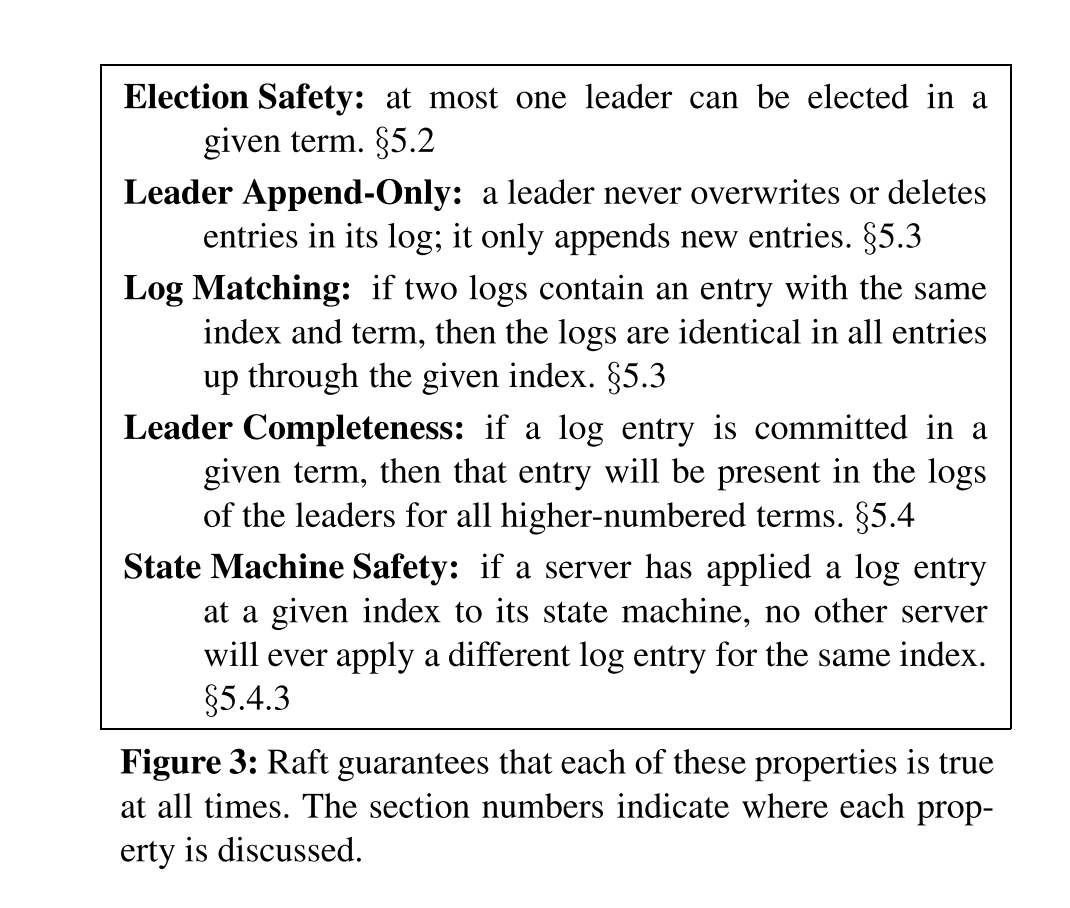
Raft 使用使用 leader 进行log 条目的复制,也就是说只能是 leader 向follower传输日志。那么在选举的过程中,新leader的产生必须包含所有的已提交的日志,否则它不能成为leader。leader 只能append 日志,不能覆盖或者删除。
当旧leader 崩溃之后,新leader 选出之后,新leader会把自己的log 条目复制给 follower。 这里需要注意的是,新旧leader 的log 条目并不是完全一致的,如果是已提交的log,肯定是一致的。未提交的 log 可能是不一致的。那么新leader复制给 follower 时,可能会覆盖follower 的 log 条目,但是复制的这些条目不会立即提交。直到新leader 接受到新请求,新请求写入到 log 并复制到多数 follower 之后,新 log 会提交,那么新log之前的所有条目也会提交。那么等下次 AppendEntries 请求之后,follower也会提交新log 并且之前的条目也全部提交。
集群成员变更
Raft 使用 joint consensus 来控制集群的配置变更,这种方式并不影响集群的可用性,并且可以保证一致对外服务。最重要的也是防止两个leader 同时在集群出现。
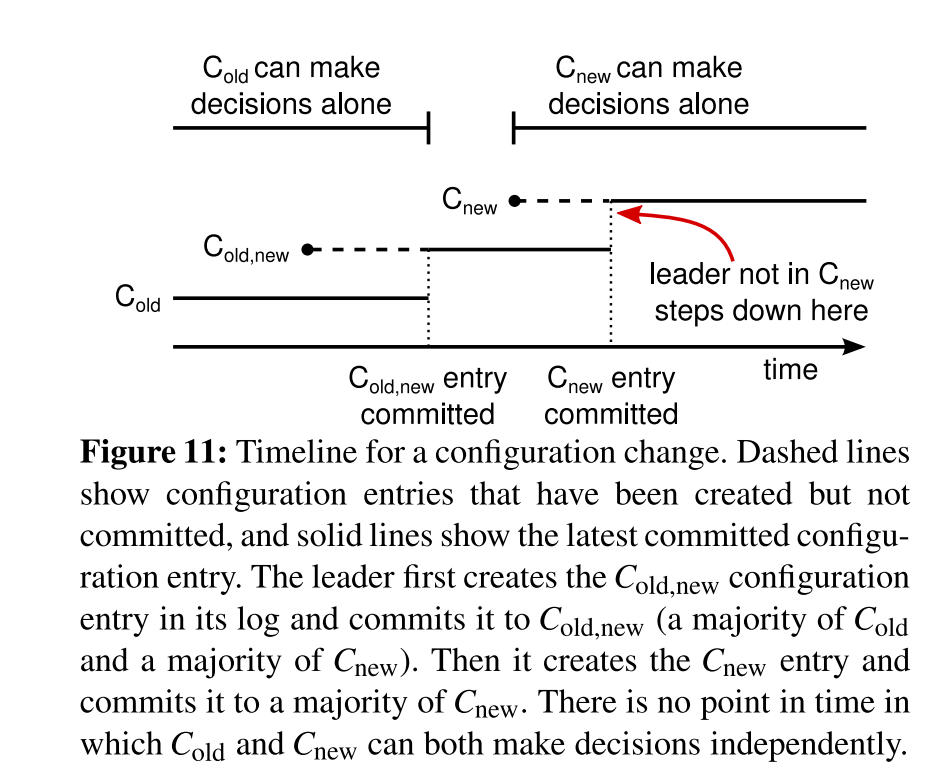
当leader收到集群的配置变更,会生成 Cold,new 配置,写入到 log 条目中、复制给follower 并且提交成功。然后会生成 Cnew 日志,然后进行提交,提交成功后 整个集群使用 Cnew 配置。在这个过程中 Cold 和 Cnew 并不会在同一个时间线出现。
可以考虑几种可能得情形:
- 如果新机器加入集群,没有存储任何的log条目,同步可能需要很长的时间。这种节点加入集群,是作为 non-voting 成员。leader 会复制日志到这个节点,但是提交日志不考虑这个节点。直到这个节点追上日志
- 如果集群的leader 不在新的配置里,在这种情况下,一旦leader提交 Cnew 配置后,就要变成 follower 状态。在提交 Cnew 的过程中,它仍然会复制日志,但是不把自己进行计数。一旦 Cnew 配置进行了提交,leader 就会开始切换了。
- 移除的集群节点有可能分裂集群。Cnew 提交后,这些移除的节点不在收到心跳,那么超时之后,会产生投票给其它节点。这可能导致集群leader变为 follower 状态。为了防止这种情况发生,如果节点任务集群的leader 存储,那么会忽略RequestVote 请求。节点如果收到了leader的心跳请求,那么在选举的超时时间内,又收到了 RequestVote 请求,就会拒绝。
客户端交互
客户端会随机选择节点进行请求,如果节点不是leader, 会拒绝这个请求,并且返回 leader 的 address 。 客户端可以再次请求到leader上。
如果leader节点提交日志后,在返回给client 之前崩溃了,可能会导致client重复发送请求。这就需要集群能保持幂等。client 可以生成请求的唯一标识,如果再次发送后,状态机能识别出这个标识,如果已经执行过会忽略掉。
读请求并不会损坏集群的数据,但是如果随机选择节点进行读的话,可能会读到脏数据。那可以使用线性读。本质上还是转发到 leader 上请求数据。但是新leader 启动后,可能最近的日志并没有提交。 这需要leader在它的term 内,需要发起一个 no-op 的操作,直接一个空日志,这样follower 同意后,会把之前的日志都提交。